İnterferometrik sistemler nasıl çalışır?
İnterferometri nasıl çalışır?
Giriş
İnterferometrideki en bilinen araç olan Michelson İnterferometresi, bilim dalında Nobel Ödülü kazanan ilk Amerikalı, Albert Abraham Michelson tarafından 1887 yılında icat edilmiştir. Michelson aynı kaynaktan gelen ayrıştırılmış ışık ışınlarını birleştirmek için aynalar ve yarı saydam aynalardan (ışın bölücüler) oluşan bir sistem bulmuştur. Lazer interferometre uzaklıkları olağanüstü bir hassasiyet ile ölçmek için iyi-yapılandırılmış bir yöntemdir.
Temel prensipler
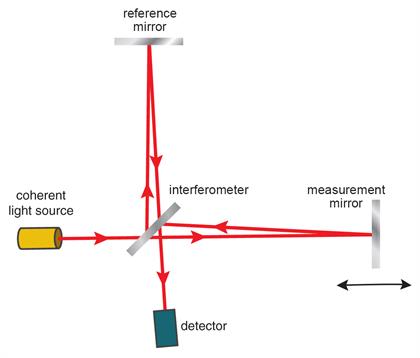
Genellikle tek bir gelen eşevreli ışık kaynağı ışını Michelson interferometresi tarafından iki özdeş ışına bölünecektir. Bu ışınların her biri, yol olarak adlandırılan, farklı bir rotada hareket eder ve bir dedektöre varmadan önce yeniden birleşirler. Her bir ışının aldığı mesafe arasındaki fark, bu ışınlar arasında bir faz farkı oluşturur. Dedektörde en başta tanımlanan dalgalar arasındaki girişim desenini oluşturan bu faz farkıdır. Tek bir ışın iki yola (ölçüm ve referans) ayrılmış ise, o zaman faz farkı fazı bu yollar boyunca değiştiren şeylerin teşhisidir. Bu yol boyunca gerçekleşen bir fiziksel değişiklik veya ışının hareket ettiği kırılma indeksindeki bir değişiklik olabilir.
Michelson interferometrisi
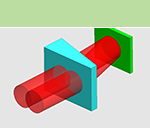
Lazer ışını (1), lazer kaynağından çıkar ve interferometrede iki ışına (referans (2) ve ölçüm (3)) ayrılır. Bu ışınlar iki retroreflektörden geriye yansır ve dedektöre ulaşmadan önce interferometrede yeniden birleşir.
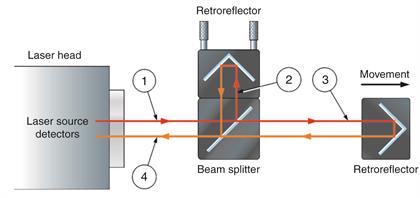
Retroreflektörlerin kullanılması, referans ve ölçüm kollarından gelen ışınlar interferometrede birbirleri ile yeniden birleştiği zaman, bu ışınların paralel olmalarını sağlar. Yeniden birleşen ışın, birbiri ile ya yapıcı, ya da yok edici bir biçimde girişimde bulunacağı dedektöre ulaşır. Yapıcı girişim sırasında iki ışın fazdadır ve her iki ışının pikleri aydınlık bir saçağa neden olacak biçimde birbirini güçlendirir. Oysaki yok edici girişim sırasında ışınlar faz dışındadır ve bir ışının piki ikinci ışının dip noktası tarafından etkisiz hale getirilir, bu nedenle karanlık bir saçak oluşur.
Sinyal işleme
Dedektördeki optik sinyal işleme bu iki ışının girişimlerinin gözlenmesine imkan verir. Ölçüm ışınının yer değiştirmesi, iki ışının bağıl fazında değişikliğe neden olur. Bu yok edici ve yapıcı girişim döngüsü, yeniden birleşen ışığın yoğunluğunun dairesel değişmeler geçirmesine neden olur. Ölçüm ışınının/retroreflektörün (3) lazer dalga boyunun yarısı kadar hareket ettiği her seferde yoğunlukta aydınlıktan karanlığa, ardından aydınlığa gerçekleşen bir değişme döngüsü oluşur.
Sistemin hassasiyeti
Lineer pozisyon ölçümlerinin hassasiyeti lazer ışığının bilinen dalga boyunun hassasiyetine bağlıdır. Lazer ışınının fiili dalga boyu, ışının geçtiği havanın kırılma indeksine bağlıdır ve bu değer hava sıcaklığı, hava basıncı ve bağıl nem ile değişmektedir. Bu nedenle ışının dalga boyunun bu parametrelerdeki her türlü değişikliği içerecek biçimde değiştirilmesi (kompanse edilmesi) gerekir.
RLE sistemleri
RLE sistemi, pozisyon geri bildirim uygulamaları için özel olarak tasarlanmış, eşsiz ve gelişmiş bir tek kaynaklı lazer interferometre sistemidir. Her bir RLE sistemi bir RLU lazer ünitesi ve bir veya iki tane RLD10 dedektör kafası içermektedir. Dedektör kafasının modeli uygulamanın gerekliliklerine bağlıdır.
İşaret Açıklamaları:
RLE nasıl çalışır?
| Lazer kaynağı | Fiber bağlama | İnterferometre optikleri | Ölçüm optikleri | Dedektör düzeni | Enkoder geri bildirim sinyalleri |
 |  |  |  |  |  |
RLU nasıl çalışır?
RLU'dan gelip, RLD'ye giden lazer çıktısı
| Lazer kaynağı | Stabilizasyon elektronikleri | Fiber bağlama | Işın işaretleme kararlılığı (stabilitesi) |
|  | |  |
Sinyali RLD'ye geri gönderir
| Enkoder hata sinyalleri | Sistem durumu | Dijital enterpolasyon | Analog enkoder sinyalleri |
|  |  |  |
RLD nasıl çalışır?
RLD'den gelip, ölçüm optiklerine giden lazer çıktısı
| İnterferometre optikleri | Işın yönlendirici |
Ya düzlem ayna, ya da retroreflektör ölçüm optikleri ile uyumlu küçültülmüş SDE ile benzersiz optik düzenler |  Sadeleştirilmiş açısal ışın ayarı sağlayarak kurulum süresini en aza indirmek için kullanılan yerleşik bir optik kama |
Ölçüm optiklerinden RLD'ye lazer girdisi
| Analog enkoder sinyalleri | Dedektör düzeni | Ölçüm optikleri |
 Dedektör düzeninden oluşturulan ve doğrudan RLU'dan geçen kendinden analog dört evreli sinyaller | Yerleşik saçak algılama düzeni, ölçüm ve referans ışınlarından gelen girişim saçaklarını elektronik bir sinyale dönüştürür | Yansıtma özelliği yüksek sert oksit kaplı elektrik geçirmez aynalar |
HS20 sistemleri

Renishaw HS20 lazer kafası bir harici lineer optik kiti ile birleştirildiğinde, uzun eksenli, yüksek hassasiyetli lineer pozisyon tespiti uygulamaları için, temassız interferometrik bir lazer enkoder sistemi oluşturur.
HS20 lazer kafası, dijital veya analog dört evreli formattaki enkoder sinyallerini kabul edecek biçimde konfigüre edilebilen herhangi bir hareket kontrol sisteminin pozisyon kontrol döngüsüne dahil edilebilir. Lazer kafası, lineer enkoder sistemler için hem OEM uygulamalarında, hem de sonradan yükseltme uygulamalarında direkt bir değiştirme olarak monte edilebilir.
HS20 nasıl çalışır?
| Lazer kaynağı | Stabilizasyon elektronikleri | Ölçüm optikleri | Hata ve uyarı | Enkoder geri bildirim sinyalleri |
 Stabilize olmuş Sınıf 2 (<1 mW) HeNe lazer |  Lazer frekans kararlılığını lazer tüp kafası teçhizatını modüle ederek kontrol etmek için kullanılır |  60 m'ye kadar uzunluğa sahip tezgah eksenleri için uzun menzilli optik çözümleri |  Her bir lazer eksenine özel aktif hata hatları, kapalı çevrim çalışma için kolaylıkla tezgah kontrolörüne entegre edilebilir. |  Yüksek çözünürlüklü pozisyon geri bildirimi için endüstri standardı dijital veya analog dört evreli sinyaller |
Kompanzasyon sistemleri
Lazer interferometrelerin genellikle otomatik olarak en üstün ölçüm hassasiyetini sağladıkları kabul edilir. Ancak, gerçekte durum biraz daha karmaşıktır. Bir lazer ile havada lineer yer değiştirmeleri ölçerken, çevresel kompanzasyon sisteminin performansı özellikle önemlidir. Lazer ve interferometrik ölçüm optikleri çok yüksek seviyelerde lineer çözünürlük ve hassasiyet sağlar, ancak "havada gerçekleştirilen" uygulamalar için sistemlerin ölçüm hassasiyetinden öncelikle sorumlu olan çevresel kompanzasyon ünitesidir.
Yer değiştirme tanımlanmış bir dalga boyu cinsinden gösterilir. Bu nedenle hassas ve tekrarlanabilir bir ölçüm dalga boyunun sabitliğine dayanır. Lazer ışını havada hareket ederken, dalga boyu kırılma indeksine bağlı olarak değişir.Bunun yanı sıra enkoderin gerçekleştirdiği ölçüm sıcaklık değişiklikleri nedeniyle iş parçasında veya tezgahın yapısında meydana gelen genleşmeleri hesaba katmamaktadır.
Yukarıdaki hata kaynağını kompanse etmek ve "havada gerçekleştirilen" uygulamalar için en yüksek hassasiyeti sağlamak için, bir kompanzasyon sistemi gereklidir.
Hassasiyeti etkileyen çevresel faktörler
Kırılma indeksi faktörleri:
 |  |  |
Hava sıcaklığı | Bağıl nem | Hava basıncı |
Termal genleşme:
 |
Malzeme sıcaklığı |
RCU10 kompanzasyon sistemi
RCU10 gerçek zamanlı dört evreli kompanzasyon sistemi, proses hassasiyetini ve tekrarlanabilirliğini arttırmak için, lineer hareket sistemlerinde çevresel hata kaynaklarını ortadan kaldırır.RCU10 tezgahın çevresindeki ortamı bir dizi sensör aracılığıyla izler ve pozisyon geri bildirim sinyallerinde gerçek zamanlı kompanzasyon gerçekleştirmek için ileri dijital sinyal işleme özelliğini kullanır. Ünite düzeltilmiş geri bildirim sinyallerini hareket kontrolörüne ya analog, ya da dijital enkoder formatında iletir.

RCU10 nasıl çalışır?
Aşağıdaki diyagram RCU10'un iş akışını göstermektedir.
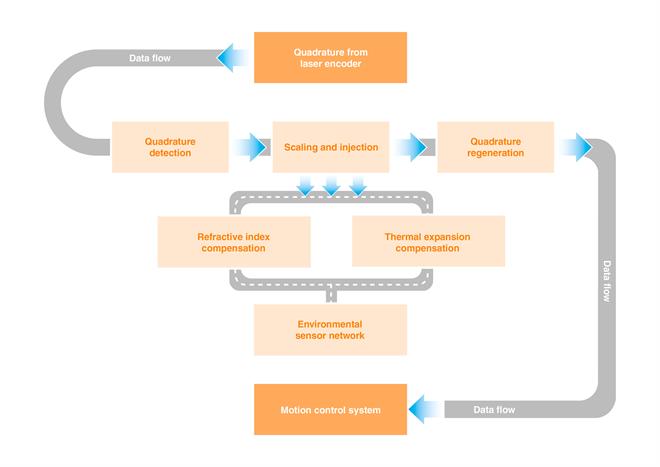
RCU10 kompanzasyon ünitesi bir dizi sensör tarafından toplanan çevresel veri ile birlikte dijital dört evreli sinyalleri kabul eder ve eksen pozisyonunu düzeltmek için gerekli olan kompanzasyon miktarını hesaplar. Ardından gerekli olan kompanzasyon dört evreli ölçekleme ve enjeksiyon (dört evreli sinyallerin eklenmesi veya çıkarılması) yoluyla enkoder geri bildirim sinyaline uygulanır. Toplam proses hareket kontrolöründe minimum gecikme ile tamamlanır. Düzeltilmiş geri bildirim sinyalleri hareket kontrolörüne ya dijital, ya da analog enkoder formatında iletilir.